甲类轮机长(轮机自动化)试题练习1
-
主机遥控的正常换向逻辑条件不包括______。
- A.车令与凸轮轴位置不一致
- B.必须停油
- C.主机转速已下降到换向转速
- D.有应急操作指令
-
在主机遥控系统中,驾驶台与集中控制室操纵部位转换时做到无扰动切换的条件是______。
- A.两处手柄都在停车位置
- B.两处手柄在同一方向即可
- C.两处手柄在同一方向,且设定转速相等
- D.两处手柄非同一方向,且设定转速相等
-
转速设定精密调压阀是按______原理工作的,靠______使输出稳定。
- A.力平衡,负反馈
- B.力矩平衡,负反馈
- C.位移平衡,正反馈
- D.力矩平衡,正反馈
-
在主机遥控系统中,逻辑程序控制功能通常包括______。Ⅰ、停车时的换向控制Ⅱ、正常起动控制Ⅲ、重起动控制Ⅳ、慢转起动控制Ⅴ、转速与负荷控制Ⅵ、机旁应急操纵
- A.Ⅰ+Ⅲ+Ⅳ+Ⅴ
- B.Ⅰ+Ⅱ+Ⅲ+Ⅳ
- C.Ⅱ+Ⅲ+Ⅳ+Ⅵ
- D.Ⅱ+Ⅲ+Ⅴ+Ⅵ
-
对于空气反冲式自清洗滤器,当电机带动旋转本体转动期间______。
- A.控制电磁阀通电,控制活塞处下位
- B.控制电磁阀通电,控制活塞处上位
- C.控制电磁阀断电,控制活塞处下位
- D.控制电磁阀断电,控制活塞处上位
-
对于采用EPC-400控制的FOPX型分油机自动控制系统,执行一次分油任务的正确操作顺序是______。Ⅰ、启动分油机马达Ⅱ、启动加热器Ⅲ、检查燃/滑油油路Ⅳ、启动油泵Ⅴ、启动EPC-400控制程序
- A.Ⅰ→Ⅱ→Ⅲ→Ⅳ→Ⅴ
- B.Ⅲ→Ⅳ→Ⅰ→Ⅱ→Ⅴ
- C.Ⅲ→Ⅳ→Ⅰ→Ⅴ→Ⅱ
- D.Ⅲ→Ⅱ→Ⅰ→Ⅳ→Ⅴ
-
辅锅炉自动点火控制系统,在自动点火时已点燃,但很快又发出点火失败信号,不可能是______。
- A.火焰监视器故障
- B.点火电极结炭严重
- C.时序控制器故障
- D.进油电磁阀未打开
-
在采用EPC-400控制的FOPX型分油机自动控制系统中,在排渣过程中补偿水电磁阀和操作水电磁阀动作规律是______。
- A.补偿水电磁阀断续通电,操作水电磁阀断电
- B.补偿水电磁阀断电,操作水电磁阀断续通电
- C.补偿水电磁阀通电,操作水电磁阀通电
- D.补偿水电磁阀断电,操作水电磁阀断电
-
在PLC控制的OEVC2-100型全自动锅炉燃烧控制系统中,若在正常燃烧过程中鼓风机因故障不能工作时,则会出现______。
- A.时序过程重新开始
- B.报警、扫风结束自动停炉
- C.扫风结束自动停炉
- D.自动停炉
-
在LAEI型辅锅炉燃烧时序控制系统中,预扫风结束后的第一个动作是______。
- A.预点火
- B.同步电机SM停转,开大风门
- C.同步电机SM停转,关小风门
- D.同步电机SM转动,关小风门
-
在采用双回路双冲量控制方案的辅锅炉双冲量水位控制系统中,如果当锅炉负荷较大时出现水位大起大落,最可能的原因是______。
- A.给水阀故障
- B.蒸汽流量测量变送器故障
- C.水位测量变送器故障
- D.给水泵故障
-
对采用双位控制的辅锅炉燃烧控制系统,若在低火燃烧时,压力还在继续升高,则______。
- A.立即发出报警,自动停炉
- B.达到高压保护值时,发出报警,不停炉
- C.进行高火燃烧
- D.达到高压保护值时,发出报警,自动停炉
-
在电极式锅炉水位控制系统中,若检测危险低水位3号电极与壳体短路,则可能出现的现象为:
- A.锅炉满水
- B.锅炉失水
- C.锅炉失水不能停炉
- D.始终发失水报警,不能起动锅炉
-
如33题图所示,在NAKAKITA型燃油粘度控制系统中,温度上升-下降速度开关设定在3档,系统投入运行后,温度未达到中间温度时,油温不再上升,其原因可能有______。Ⅰ、中间温度设定太高Ⅱ、电源保险丝烧断Ⅲ、电机SM1或其传动装置故障Ⅳ、电机SM2或其传动装置故障Ⅴ、把柴油-重油转换开关转到了D位Ⅵ、测粘计马达因故障停转
- A.Ⅰ+Ⅲ+Ⅴ
- B.Ⅱ+Ⅲ+Ⅳ
- C.Ⅱ+Ⅳ+Ⅴ
- D.Ⅳ+Ⅴ+Ⅵ
-
在VISCOCHIEF型燃油粘度控制系统中,打开粘度控制器电源时,通常情况下,粘度控制器上选择开关的状态是______。
- A.处在“OFF”位置
- B.处在“DO”位置
- C.处在“HFO”位置
- D.与选择开关的状态无关
-
如33题图所示,要调整NAKAKITA型燃油控制系统中的温度控制与粘度控制切换温度,可调整______。
- A.温度上升-下降设定开关位置
- B.上限温度设定开关位置
- C.下限温度设定开关位置
- D.可调凸轮位置
-
在NAKAKITA型燃油粘度控制系统中,若测粘计毛细管中间部位破损,则系统的故障现象为______。
- A.一直对重油进行温度上限值的定值控制
- B.一直对柴油进行温度上限值的定值控制
- C.重油粘度不断升高
- D.重油粘度不断降低
-
在WALTON恒温阀运行过程中,手动扭转轴改变指针位置,可改变______。
- A.调节阀动作的起始压力
- B.调节阀的初始阀门开度
- C.冷却水温度的给定值
- D.WALTON恒温阀的比例带
-
所下图所示,在NAKAKITA型燃油粘度控制系统中,若逆时针转动温度程序调节器驱动杆上的凸轮,则______。
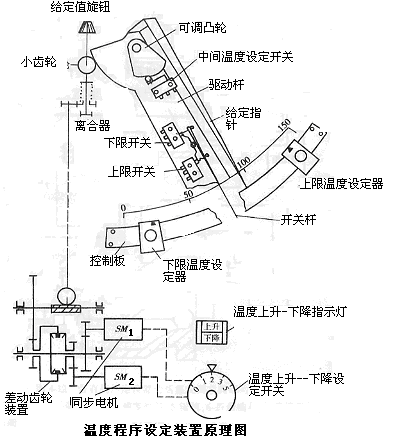
- A.油温下限升高
- B.油温上限降低
- C.柴油-重油转换温度降低
- D.柴油-重油转换温度升高
-
MR-Ⅱ型电动冷却水温度控制系统的调节器板MRV(比例微分运算电路)如图所示,若调大W2的电阻值,则______。
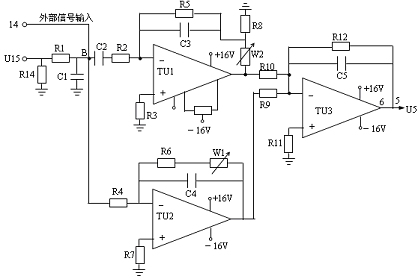
- A.积分时间Td↓
- B.微分时间Td↑
- C.比例带PB↓
- D.比例带PB↑
-
如图所示,在用TQWQ型气动三通调节阀组成的气缸冷却水温度控制系统中,其感温元件采用的是______。
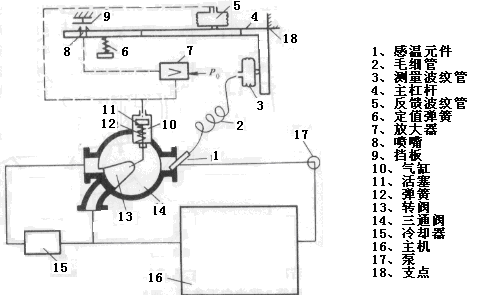
- A.金属丝热电阻
- B.热敏电阻
- C.感温盒
- D.温包
-
如29题图所示,在用TQWQ型气动三通调节阀组成的气缸冷却水温度控制系统中,若系统受到扰动后,水温绕给定值激烈振荡,其原因和消除方法分别是______。
- A.给定值太高,应调定值弹簧
- B.比例带太小,应左移反馈波纹管
- C.积分时间太短,应关小积分阀
- D.测量力矩太大,应上移测量波纹管
-
在用经验法整定PI调节器参数时,要根据控制对象特性确定初始参数,若控制对象惯性大,则初始PB和Ti应选得______。
- A.PB大一些,Ti小一些
- B.PB大一些,Ti大一些
- C.PB小一些,Ti小一些
- D.PB小一些,Ti大一些
-
对于输入气压信号从膜片上部进入的气动薄膜调节阀,当输入的气压信号增大时,阀杆下移,这种动作方式称为______。
- A.反作用式
- B.正作用式
- C.气开式
- D.气关式
-
在采用M58型气动调节器组成的温度控制系统中,若微分阀堵塞,则测量值会______。
- A.保持原来值不变
- B.下降到下限值以下
- C.上升到上限值以上
- D.激烈振荡
-
在用M58型气动调节器(切除微分作用)组成的锅炉水位控制系统中,系统受到扰动后,水位经过多次振荡才稳定在给定值上,其调整方法是______。
- A.逆时针转动比例带调整杆,关小积分阀
- B.逆时针转动比例带调整杆,开大积分阀
- C.顺时针转动比例带调整杆,关小积分阀
- D.顺时针转动比例带调整杆,开大积分阀
-
对NAKAKITA型PID调节器,哪个说法是正确的?
- A.比较环节是按力矩平衡原理工作的
- B.PB调整靠节流分压器
- C.全开微分阀可实现PI作用规律
- D.全开积分阀可实现PD作用规律
-
如下图所示,在QXZ型色带指示仪中,测量信号变化时,遮光板移动很慢,需很长时间才能稳定指示某个值,其调整方法是______。
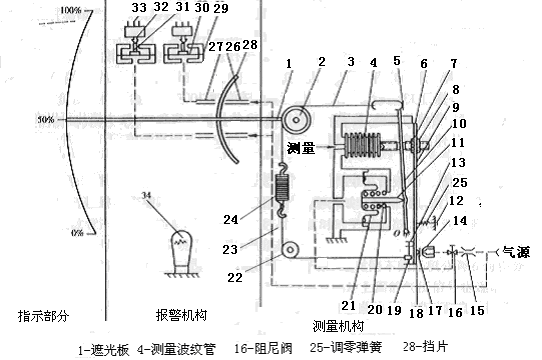
- A.上移测量波纹管
- B.开大阻尼阀
- C.关小阻尼阀
- D.扭紧调零弹簧
-
如22题图所示,在QXZ型色带指示仪中,为使下限报警值从0提高到5%,调整方法为______。
- A.拉长下面的挡片
- B.缩短下面的挡片
- C.拉长上面的挡片
- D.缩短上面的挡片
-
对变送器迁移的错误理解是______。
- A.迁移后量程起点改变
- B.迁移后量程终点不变
- C.迁移后量程终点改变
- D.迁移后量程不变
-
对于QBC型单杠杆气动差压变送器测量管上的三个阀(截止阀、平衡阀和冲洗阀),接入信号时应______。
- A.先开截止阀,后开平衡阀
- B.先开平衡阀,后开截止阀
- C.先开平衡阀,后开冲洗阀
- D.先开冲洗阀,后开平衡阀
-
气动放大环节的输入信号是______。
- A.喷嘴背压
- B.挡板开度
- C.比较环节的输入
- D.反馈环节的输出
-
有一台量程为20~100℃的单杠杆气动温度变送器,在测试时得到的数据为输入20℃时,P出=0.02MPa,100℃时P出=0.09Mpa,这时应当首先______。
- A.上移反馈波纹管
- B.下移反馈波纹管
- C.调节调零弹簧,使挡板离开喷嘴
- D.调节调零弹簧,使挡板靠近喷嘴
-
可编程序控制器合上电源后,在系统软件的管理下它首先进行的工作是______。
- A.自诊断
- B.输入用户程序
- C.读入现场信号
- D.输出结果
-
可编程序控制器的控制功能包括______。Ⅰ、模拟量的开环控制Ⅱ、联网、通信及集散控制Ⅲ、开关量的开环控制Ⅳ、数字量的闭环控制Ⅴ、数字量的智能控制Ⅵ、数字采集与监控
- A.Ⅰ+Ⅱ+Ⅴ+Ⅵ
- B.Ⅱ+Ⅲ+Ⅴ+Ⅵ
- C.Ⅰ+Ⅱ+Ⅲ+Ⅴ
- D.Ⅱ+Ⅳ+Ⅴ+Ⅵ
-
2级精度的压力表量程为0~2.0MPa,其最大绝对误差为______MPa。
- A.0.08
- B.0.06
- C.0.04
- D.0.02
-
在微型计算机中,输入输出接口电路不包括的作用是______。
- A.能存贮用户程序
- B.速度匹配
- C.电平和功率的匹配
- D.能为CPU提供外部设备的状态
-
有一可编程序控制器用户程序编写示例图,请指出______是梯形图。
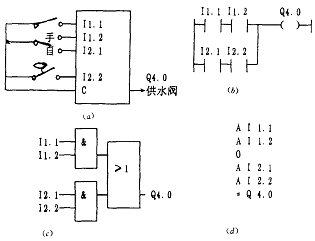
- A.(a)
- B.(b)
- C.(c)
- D.(d)
-
十进制数43所对应的二进制数及该二进制数最高位的权数分别为______。
- A.A
- B.B
- C.C
- D.D
-
可用紫外线照射擦除其内容的只读存贮器是______。
- A.ROM
- B.PROM
- C.EPR0M
- D.EEPR0M
-
在采用PID调节器的定值控制系统中,当Ti、Td均减小时,系统可能出现______。
- A.非周期过程
- B.振荡趋势增强
- C.较大静差
- D.稳定性增强
-
在用比例调节器组成的控制系统中,若把比例带整定得很大,其系统动态过程是______。
- A.振荡激烈
- B.静态精度高
- C.过渡过程时间短
- D.容易受到外部干扰的影响
-
在锅炉水位自动控制系统中,当锅炉负荷突然变化后,为使水位能最终稳定在给定值上,控制系统最好采用______。
- A.比例调节器
- B.PD调节器
- C.PI调节器
- D.PID调节器
-
有两台PID调节器R1和R2,其参数整定为PB1<PB2,Ti1<Ti2,Td1<Td2,这表示______。
- A.R1的比例、积分、微分作用都比R2强
- B.R1的比例、积分、微分作用都比R2弱
- C.R1的比例、积分作用比R2弱,微分作用比R2强
- D.R1的比例、积分作用比R2强,微分作用比R2弱
-
在锅炉蒸汽压力的双位式控制系统中,若停炉或起炉压差过大,则原因是______。
- A.压力设定值太大
- B.压力设定值太小
- C.幅差值太大
- D.幅差值太小
-
在采用双位作用规律调节器的控制系统中,其控制特点是______。
- A.对被控量进行连续控制
- B.稳态时静态偏差较大
- C.按偏差的大小和方向控制
- D.按被控量的上、下限值控制
-
没有自平衡能力的控制对象受到阶跃扰动后,其输出是按______。
- A.比例规律输出
- B.指数曲线规律输出
- C.“S”型曲线规律输出
- D.积分规律输出
-
在改变给定值的控制系统中,若超调量上升,则控制系统______。
- A.稳定性好
- B.稳定性差
- C.静态偏差大
- D.动态精度高
-
有一控制对象受到扰动后,被控量变化快,且达到新稳态值变化量大,其原因是______。
- A.τ大,K小
- B.T小,τ小
- C.T小,K大
- D.T大,K大
-
反馈控制系统中若测量单元发生故障而无信号输出,这时被控量将______。
- A.保持不变
- B.达到最大值
- C.达到最小值
- D.不能自动控制





